Train Track Monitoring
Automated track monitoring has huge potential to enhance safety and reduce inspection costs. Unlike roads, train tracks have a very small turning angle or a very large turning radius to ensure passenger comfort. This makes the use of long-range narrow-FOV vision systems appropriate to inspect debris or unidentified objects on tracks that can pose a threat to the train. We conducted an experiment to assess the performance of Hammerhead with GridDetect in identifying an object of dimension 42 cm high x 45 cm wide, kept on the train tracks at various distances.
We have released three datasets, summarizing the various experiments.
Hammerhead and GridDetect
Static-435m
Dataset Download (.zip) (385 MB)
Static-600m
Dataset Download (.zip) (384 MB)
Dynamic
Dataset Download (.zip) (31.7 GB)
Point Cloud Download (.zip) (9.3 GB)
GroundTruth
Static-435m
GroundTruth Download (.zip) (415 MB)
Static-600m
GroundTruth Download (.zip) (414 MB)
Dynamic
GroundTruth Download (.zip) (34.0 GB)
Camera Specifications
| Horizontal Field of View | 10 degrees |
|---|---|
| Baseline | 4.24 meters |
| Resolution | 5.4 MP |
| Bit depth | 16 bit |
| Frame rate | 2 FPS |
Setup
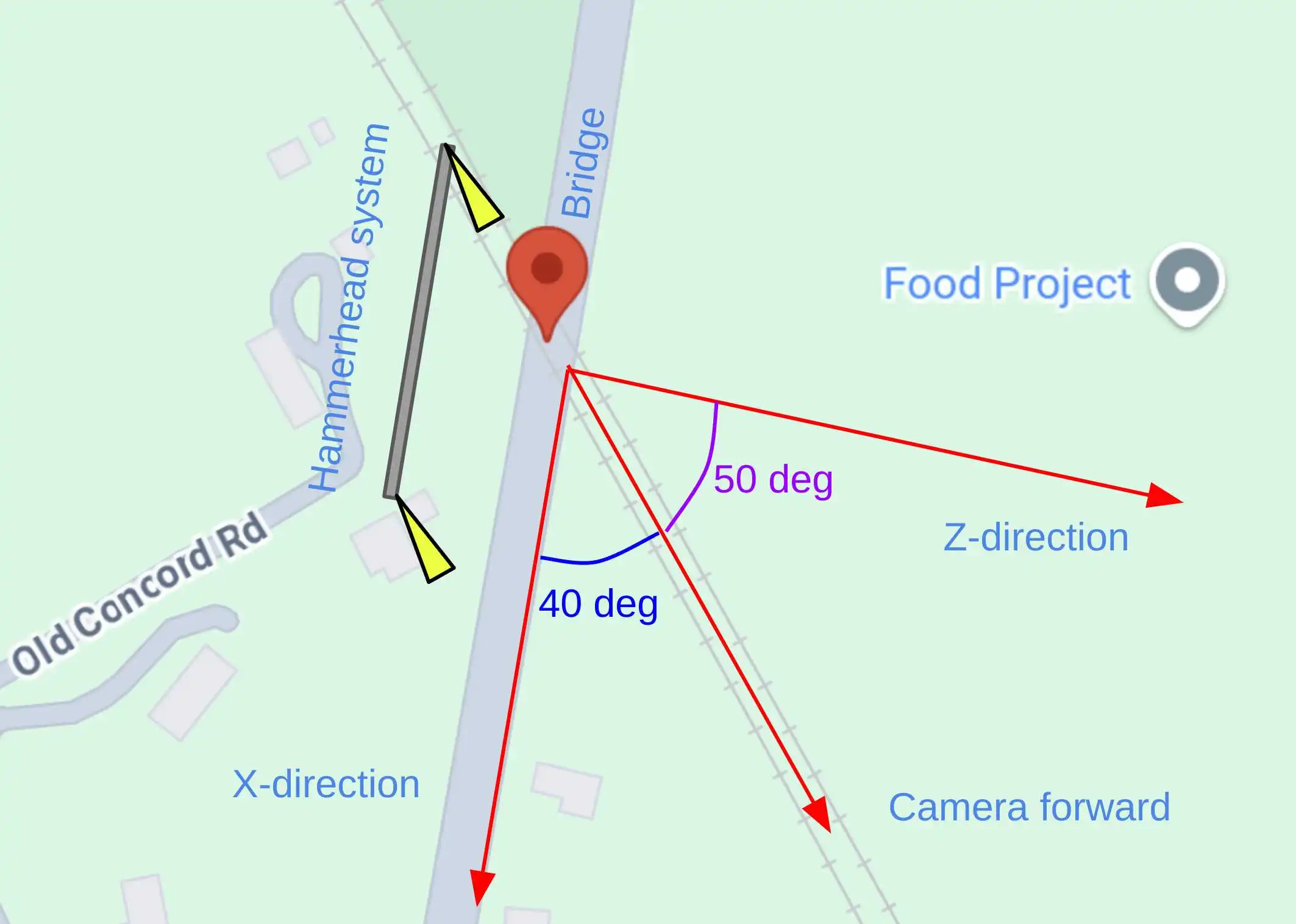
The cameras were mounted on two separate mounts, a truly untethered system. They were pointing toward the tracks, which were at a 50-degree angle w.r.t the principal axis of the cameras. The diagram below shows a schematic of the experimental setup.
Topbot images
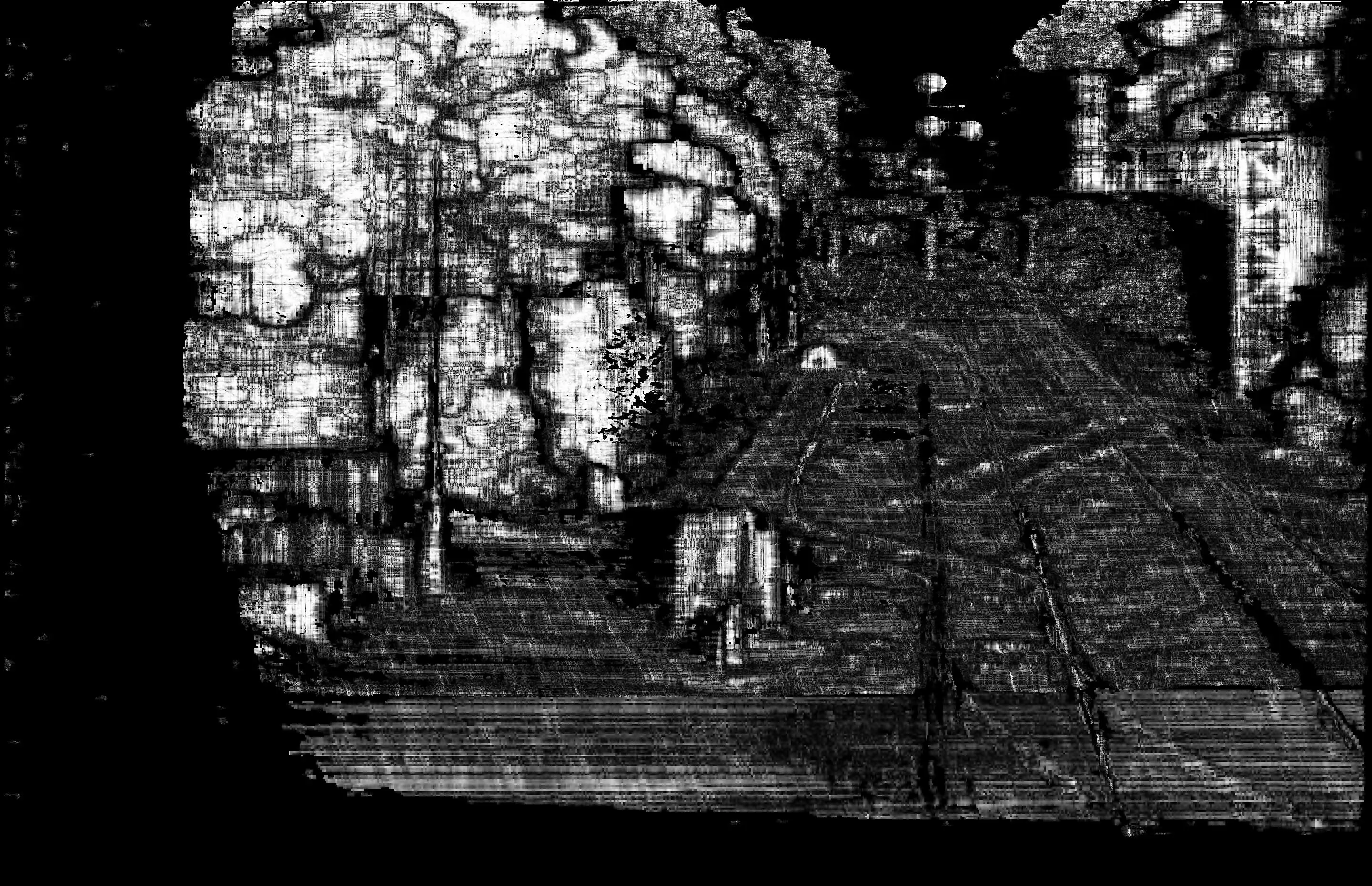
Shown below is a topbot image captured from our cameras, showing as far as 1.5km of straight tracks.

Hammerhead and GridDetect Performance
Range tests
We conducted two range tests, starting with keeping a red colored box on the tracks at 435.0m and 600.0m.
Box At 435m
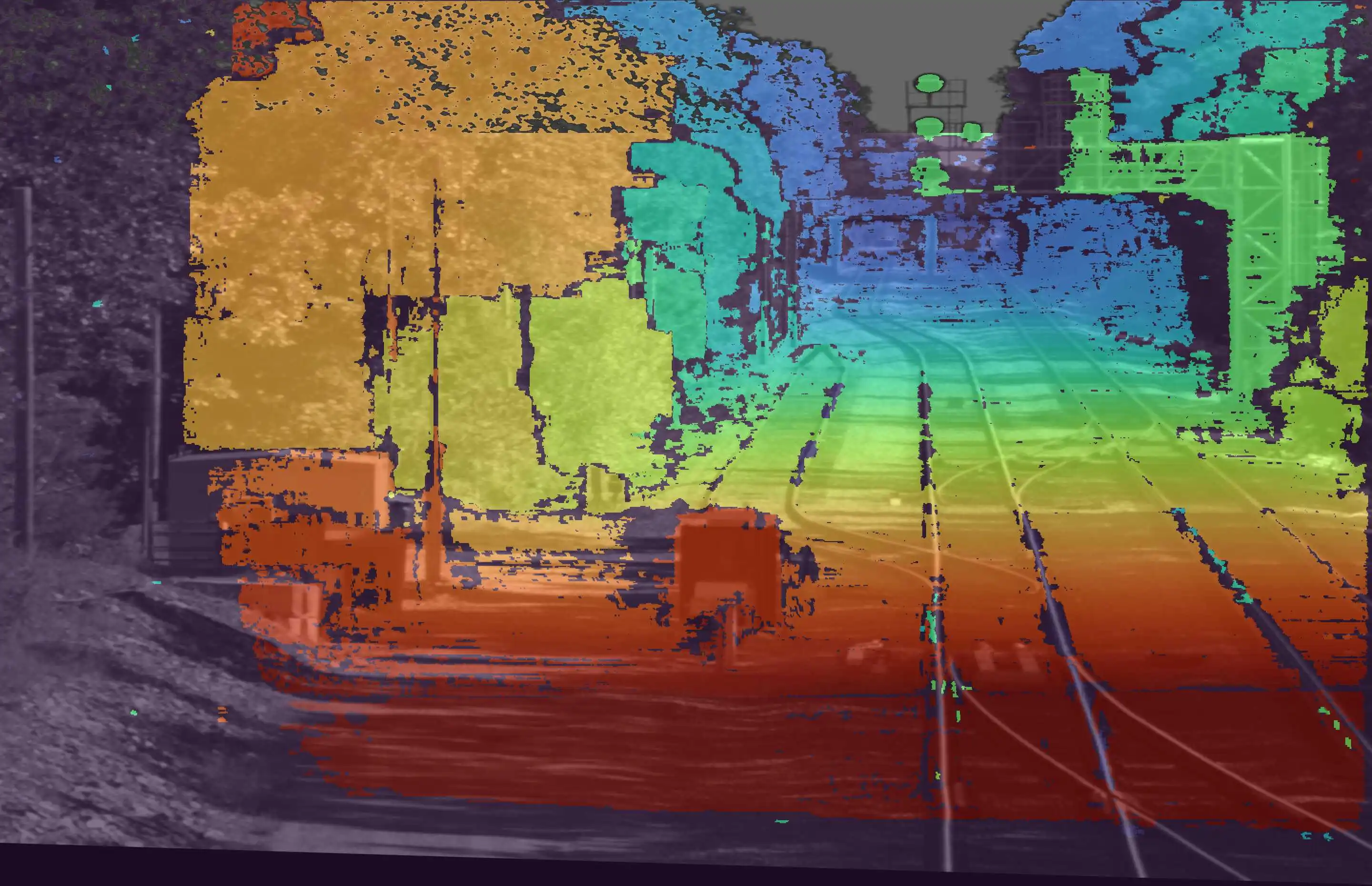
The corresponding topbot for the 435m box test is shown below

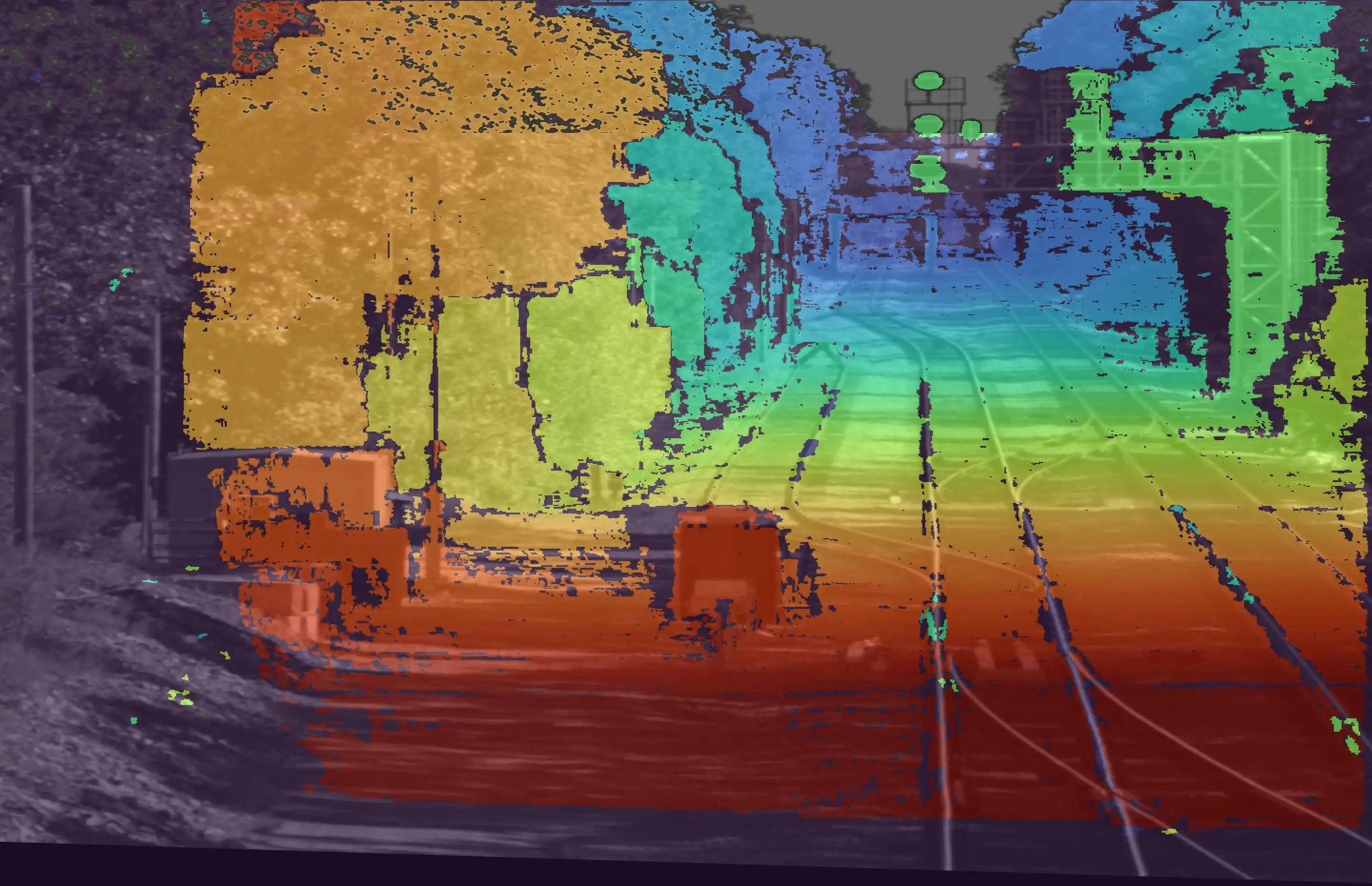
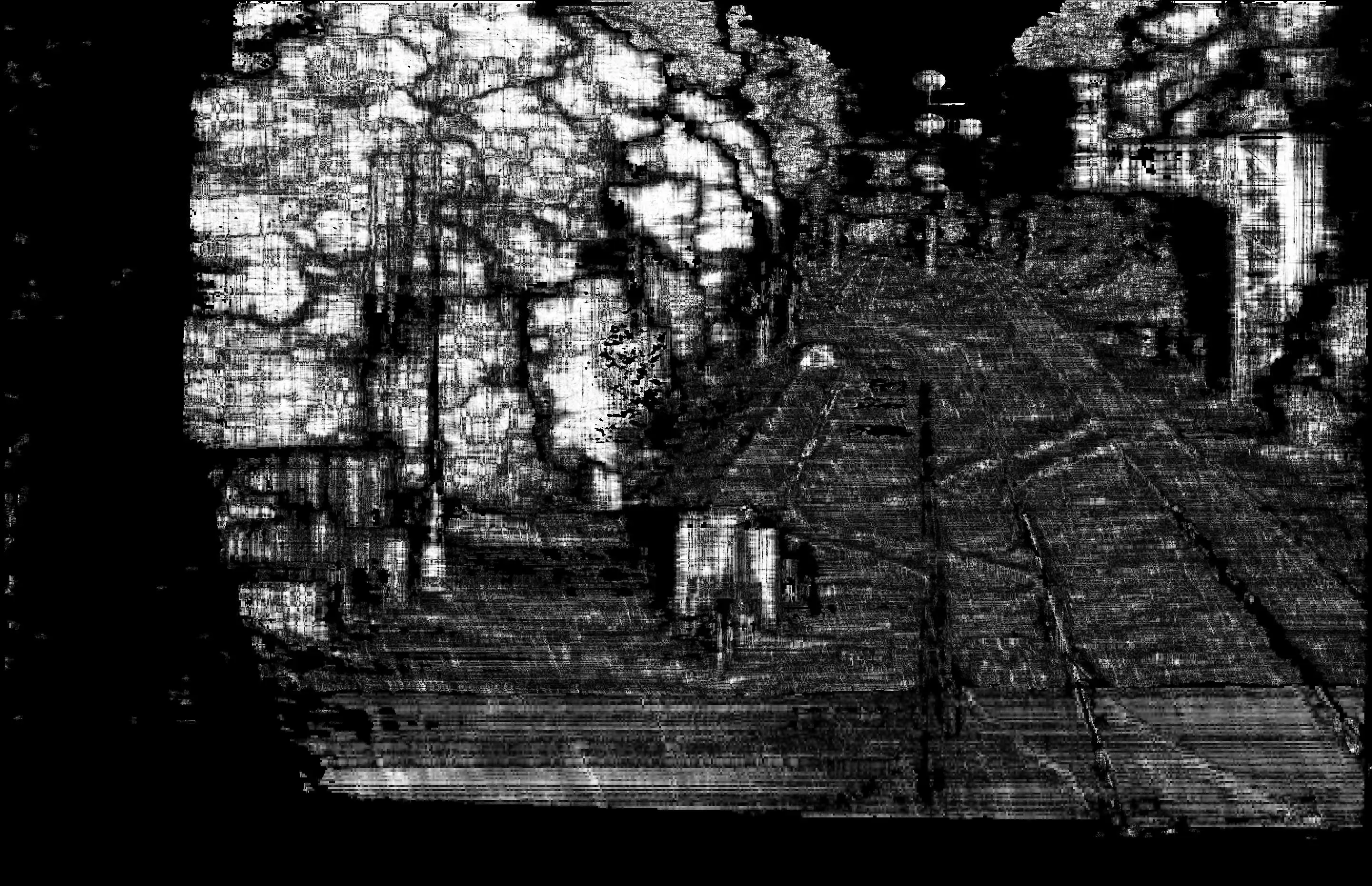
The image registers 18x20 pixels for the red box at 435m. After calibration using our Hammerhead technology, we obtain dense depth maps with a 100% return rate on the red box. In the dataset, we show a confidence map of our algorithm for each pixel in the left-rectified image domain.
With our Grid-detect technology, we are able to distinguish the red box from the tracks and locate it at 433.0m (~0.5% error), shown below:
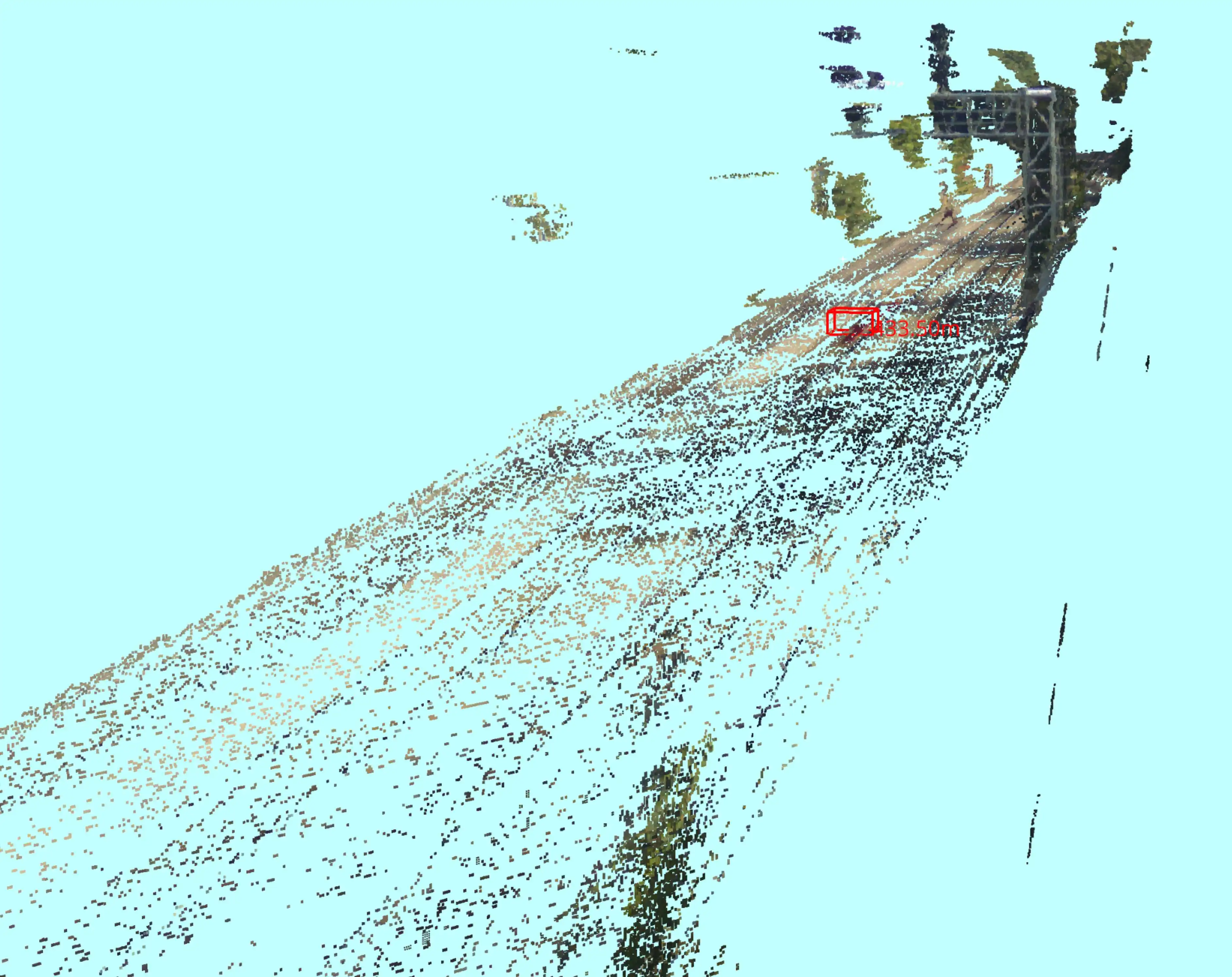
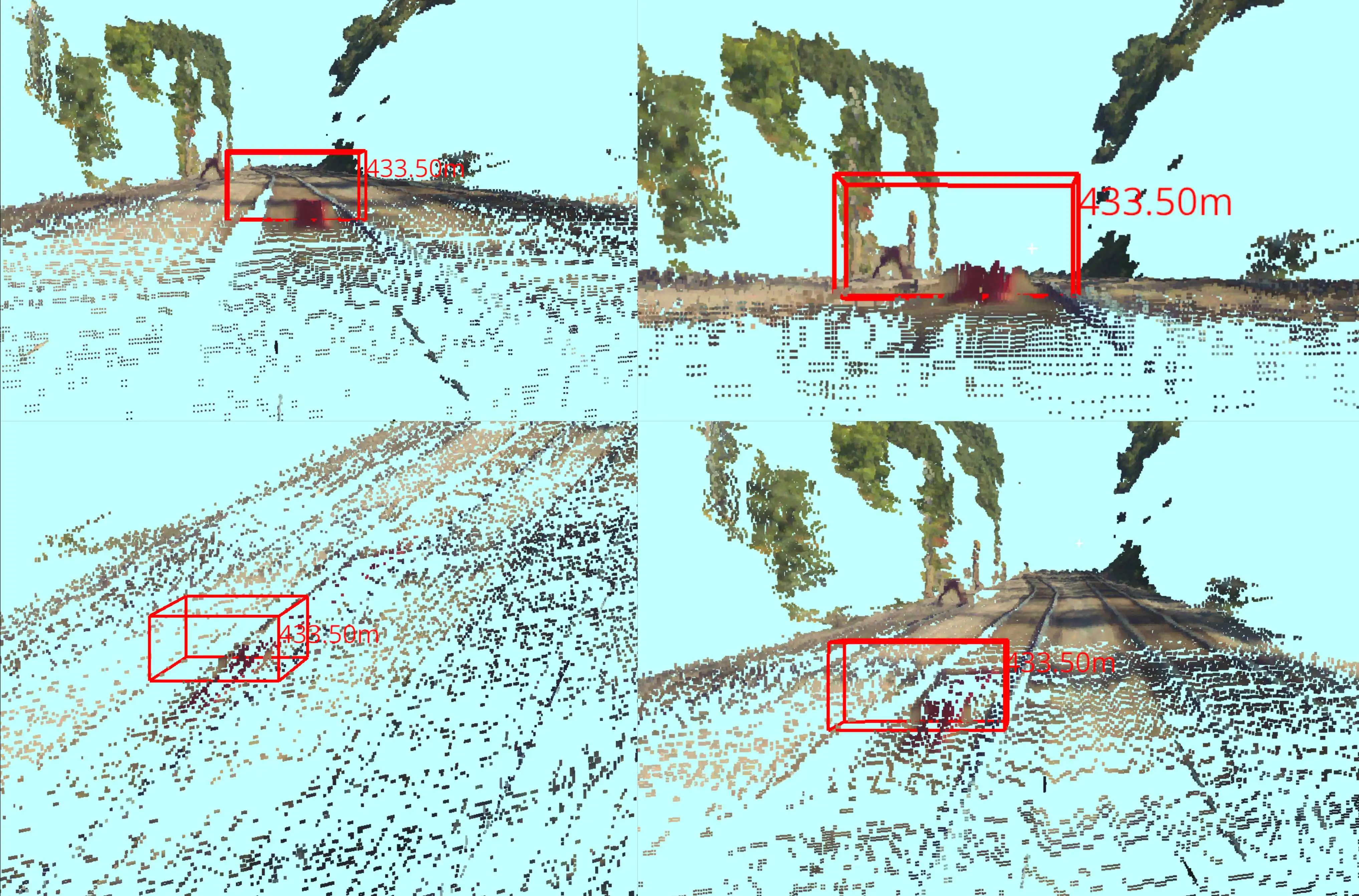
The red box around the object denotes a detection by our algorithm, and the range is denoted next to it. The detection output is a .csv file and each row stores the locations of the 3 consecutive corners of the bounding box (x1, z1, …) in meters, and relative velocity along x and z directions (vx, vz) in m/s. The bounding boxes can be visualized through our viewer by checking the box "Display Boxes" in the "Point Cloud" window. For a deeper dive into the results, let's take a look at the point cloud shown below:
We can observe a phenomenal density of points on the tracks, as well as the neighboring entities like the poles, lights, and trees. Unlike roads, train tracks do not have a planar geometry, making it challenging for traditional approaches and resulting in false alarms in the detection system. However, our GridDetect technology can adapt to the uneven surface and leverage the 3D jump in the point cloud, along with the stereo-shadow behind these structures, to identify such hazardous objects.
Box At 600m
The corresponding topbot for the 600m box test is shown below

The image registers 11x13 pixels for the red box at 600m. After calibration using our Hammerhead technology, we obtain dense depth maps with 100% return rate on the red box.
Again, with Grid-detect, we are able to distinguish the red box from the tracks and locate it at 584.0m (~2.6% error), shown below:
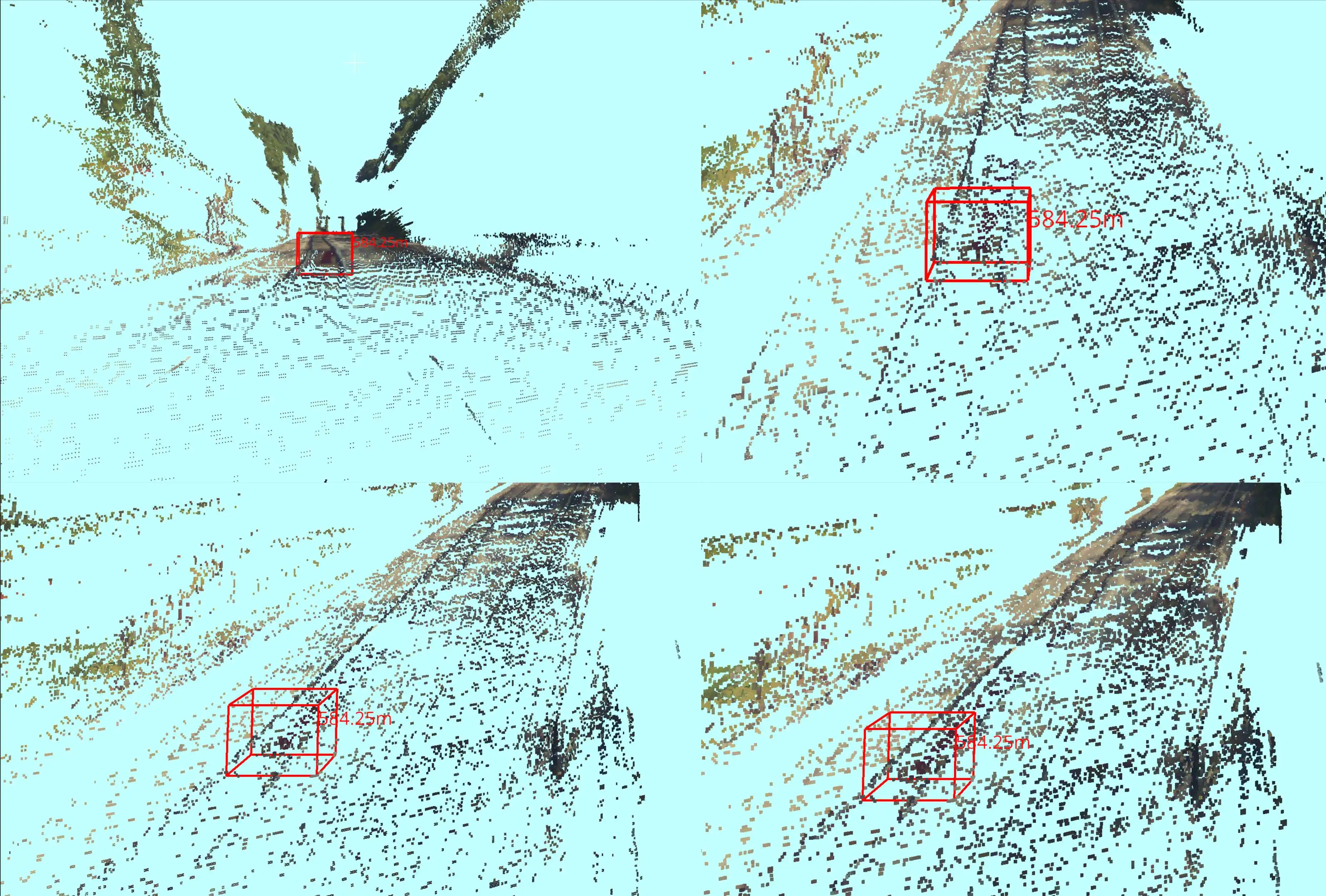
In the point cloud we can vividly identify certain entities like the train stopper, the poles, and the bridge. As expected from a stereo-system, the object is more spread along the principal axis of the camera due to reduced range resolution at this distance. Yet, we can reliably detect the red box with our GridDetect technology.
Dynamic test
In the dynamic test, we record images when a train is approaching and use Hammerhead technology to recreate a 3D view of the world, in realtime. Shown below is the output pointcloud from hammerhead:
We observe that with Hammerhead we are able to detect the approach of the train from as far as 1 km away from the camera setup.
Conclusion
Hammerhead technology can reliably detect hazardous objects of size 42 cm high x 45 cm wide at as far as 600m. Furthermore, it can report its 3D position and velocity if the object is moving. This can enable safer operation of trains and can facilitate massive cost savings spent in track inspection. Furthermore, the qualitative tests shows the capability to construct 3D view of objects as far as 1km away.
GroundTruth Performance
Dynamic
Static-435m